Accessing On-Board Diagnostics (OBD2) data through a Controller Area Network (CANbus) is a common task for automotive enthusiasts and professionals. This article, acting as a mini Obd2 Wiki, details a user’s experience in successfully retrieving OBD2 data using a Carloop device and highlights key code adjustments needed for a smooth connection.
Initially, receiving data from the car’s CANbus proved challenging. However, by implementing a series of code modifications, a reliable data stream was established. These changes, crucial for anyone exploring obd2 wiki resources and attempting similar projects, are outlined below:
-
Library Inclusion: Incorporating the “carloop” library is the foundational step. This is achieved by adding
#include <carloop.h>at the beginning of your program. This library is specifically designed to facilitate communication between your microcontroller and the Carloop device, streamlining the process of accessing CANbus data as described in many obd2 wiki entries. -
Carloop Revision Declaration: Declaring the Carloop revision is essential for proper device initialization. The line
Carloop<carlooprevision2> carloop;informs the microcontroller about the specific Carloop revision being used. This step, often mentioned in obd2 wiki guides related to Carloop, ensures compatibility and correct operation. -
Initializing Carloop: The standard CAN bus initialization
can.begin(500000);is replaced withcarloop.begin();. According to Carloop documentation and obd2 wiki information,carloop.begin()defaults to a 500000 bits/sec speed, which is a common and often suitable speed for OBD2 communication. This simplifies the setup and aligns with best practices found in obd2 wiki tutorials. -
Receive Function Modification: All instances of
can.receive(message)need to be updated tocarloop.can().receive(message). This adjustment ensures that the receive function correctly interfaces with the Carloop library, routing the CANbus data through the Carloop object as intended. This is a critical detail often emphasized in obd2 wiki troubleshooting sections. -
Transmit Function Modification: Similarly, all
can.transmit(message)commands should be changed tocarloop.can().transmit(message). This modification mirrors the receive function update, ensuring the transmit function also utilizes the Carloop library for proper CANbus communication. Correcting transmit and receive functions is a fundamental aspect of CANbus communication, as detailed in any comprehensive obd2 wiki. -
Data Padding (Example): The lines
message.data[3] = 0x55; message.data[4] = 0x55; message.data[5] = 0x55; message.data[6] = 0x55; message.data[7] = 0x55;were added. While the exact reason for their necessity in this specific case isn’t definitively stated, it suggests potential data padding or specific message formatting requirements that can sometimes be vehicle-dependent, as hinted at in advanced obd2 wiki discussions.
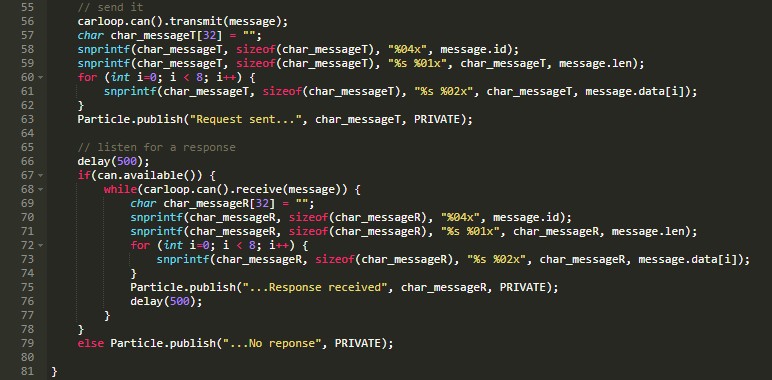
{width=772 height=793}Further testing revealed an interesting observation regarding message length. Initially, messages with message.len=3; did not elicit a response from the CANbus. However, changing the message length to message.len=8; resulted in successful OBD2 data retrieval. The reason for this behavior remains unclear but could be related to specific CANbus protocol requirements of the vehicle or the Carloop interaction. This message length sensitivity is a valuable point for those delving into obd2 wiki information and experimenting with CANbus communication.
{width=772 height=380}In conclusion, accessing OBD2 data via CANbus with Carloop requires specific code adjustments, primarily involving the correct utilization of the Carloop library and potentially considering message length. This practical example serves as a useful addition to the collective knowledge found within an obd2 wiki, offering real-world insights for those navigating OBD2 and CANbus communication.